Moteur pas à pas 5V
Ce petit moteur pas à pas est idéal pour les petits projets et l'expérimentation piloté par un arduino en 5v sans avoir besoin d'alimentation supplémentaire.
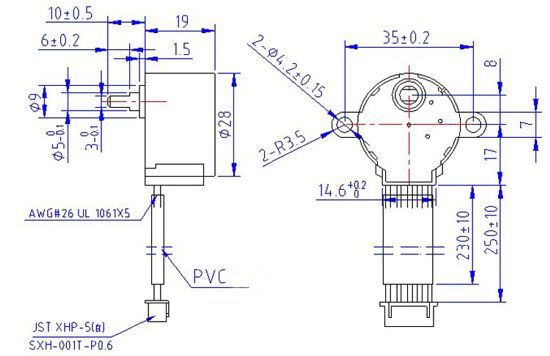
Ce moteur uni-polaire est construit avec une plaque de montage avec deux trous de fixation.
Le moteur fait une révolution en 32 étapes de 11,25 degrés, et il contiens à l'intérieur des engrenages de réduction de 1/16 . (En fait, 1 / 16,032)
Ce qui signifie qu'il y a vraiment 32 * 16,032 pas par tour soit 513 étapes !
En 5v on peux atteindre 25 tours par minutes
En 9v 50 RPM
http://www.adafruit.com/product/858
http://eskimon.fr/290-arduino-603-petits-pas-le-moteur-pas-pas
Code source